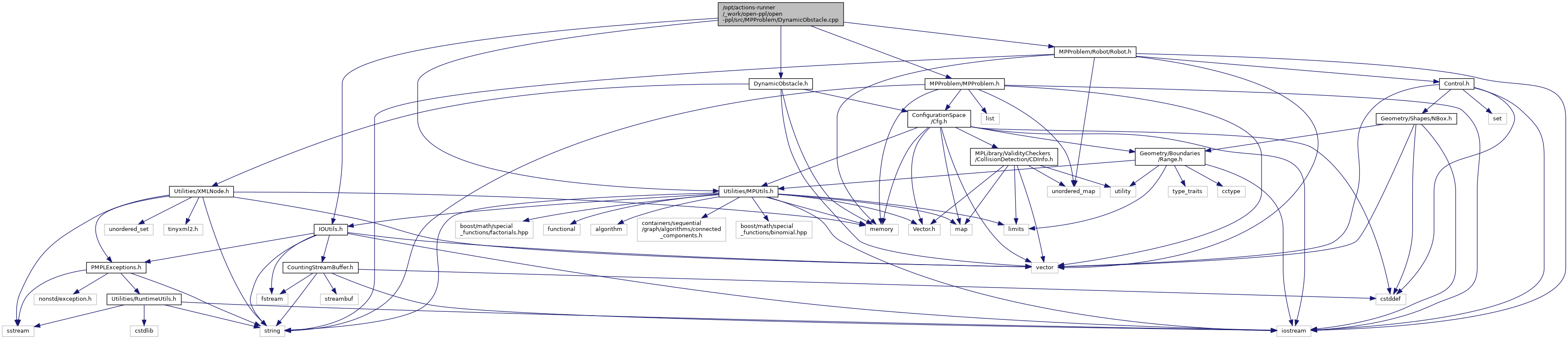
#include "DynamicObstacle.h"
#include "MPProblem/MPProblem.h"
#include "MPProblem/Robot/Robot.h"
#include "Utilities/IOUtils.h"
#include "Utilities/MPUtils.h"