|
Parasol Planning Library (PPL)
|
|
Parasol Planning Library (PPL)
|
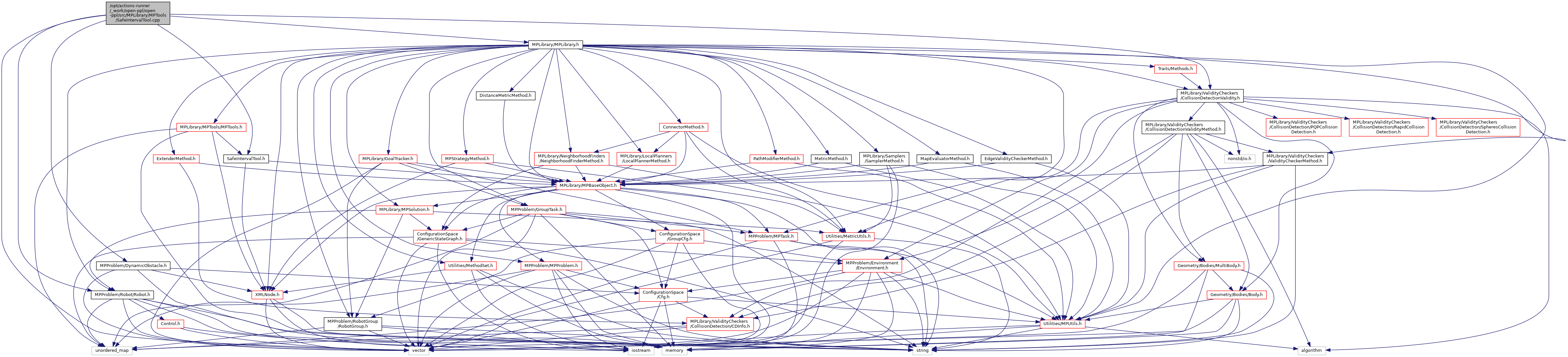
#include <vector>#include "SafeIntervalTool.h"#include "MPProblem/DynamicObstacle.h"#include "MPProblem/Robot/Robot.h"#include "MPLibrary/MPLibrary.h"#include "MPLibrary/ValidityCheckers/CollisionDetectionValidity.h"