|
Parasol Planning Library (PPL)
|
|
Parasol Planning Library (PPL)
|
#include "Actuator.h"#include <algorithm>#include <limits>#include <sstream>#include <string>#include "Robot.h"#include "Geometry/Bodies/MultiBody.h"#include "Utilities/PMPLExceptions.h"#include "Utilities/XMLNode.h"#include "nonstd/numerics.h"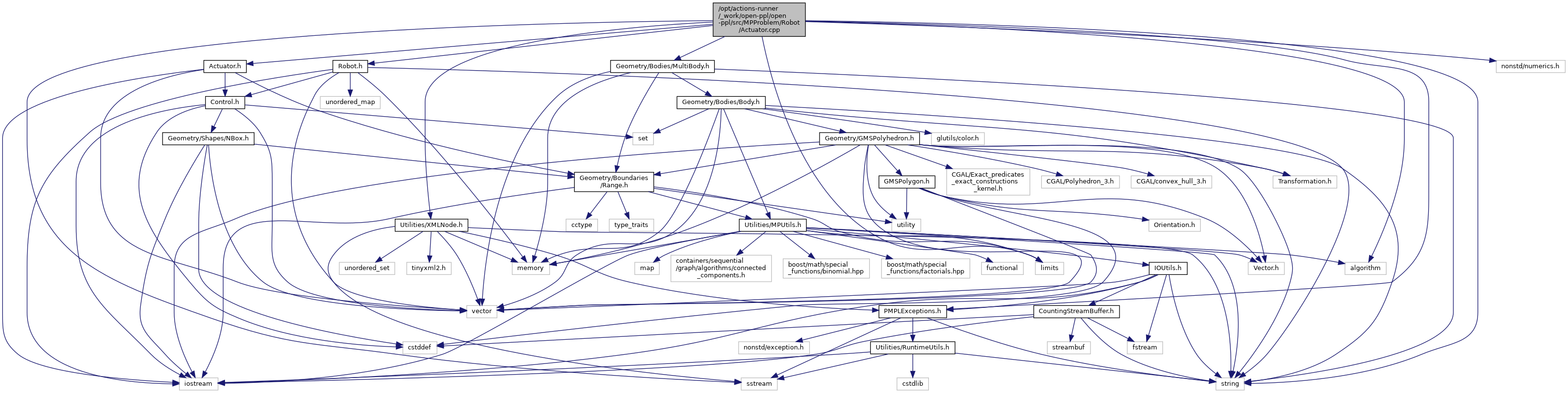
Functions | |
| std::ostream & | operator<< (std::ostream &_os, const Actuator &_a) |
| std::ostream& operator<< | ( | std::ostream & | _os, |
| const Actuator & | _a | ||
| ) |