|
Parasol Planning Library (PPL)
|
|
Parasol Planning Library (PPL)
|
#include "Control.h"#include <iostream>#include <memory>#include <string>#include <vector>#include <unordered_map>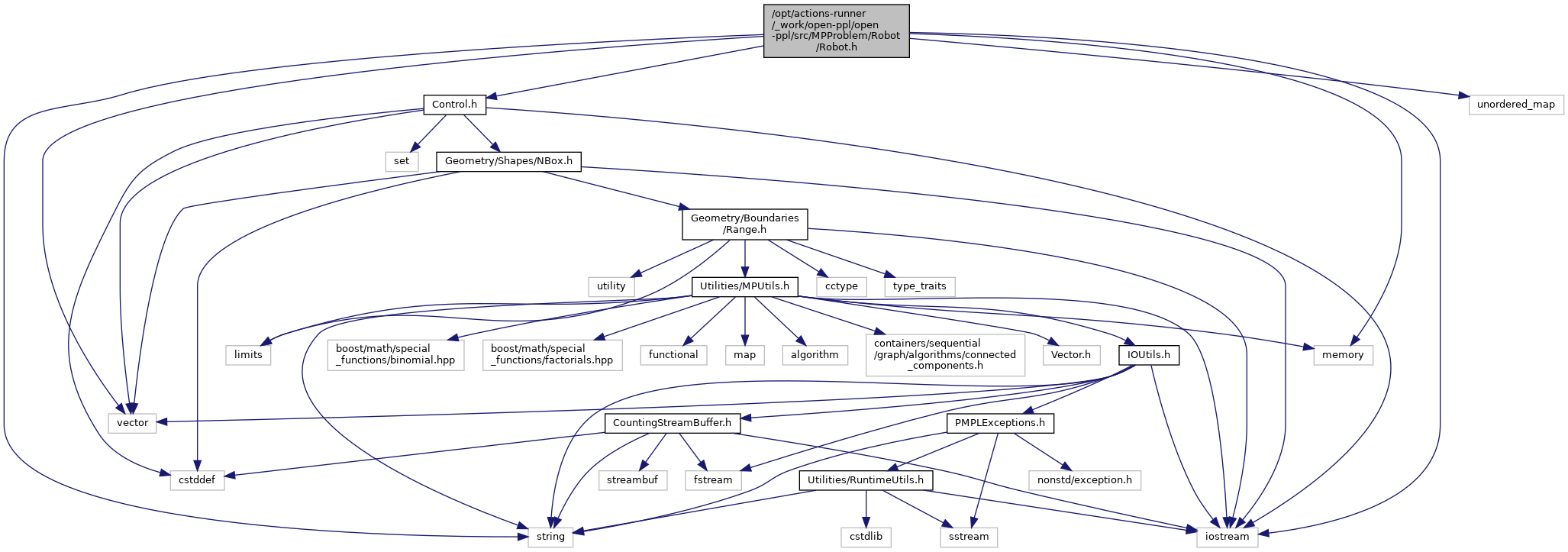

Go to the source code of this file.
Data Structures | |
| class | Robot |
Functions | |
| std::ostream & | operator<< (std::ostream &, const Robot &) |
| std::ostream& operator<< | ( | std::ostream & | _os, |
| const Robot & | _r | ||
| ) |