Parasol Planning Library (PPL)
src
ObstacleSubset
Functions
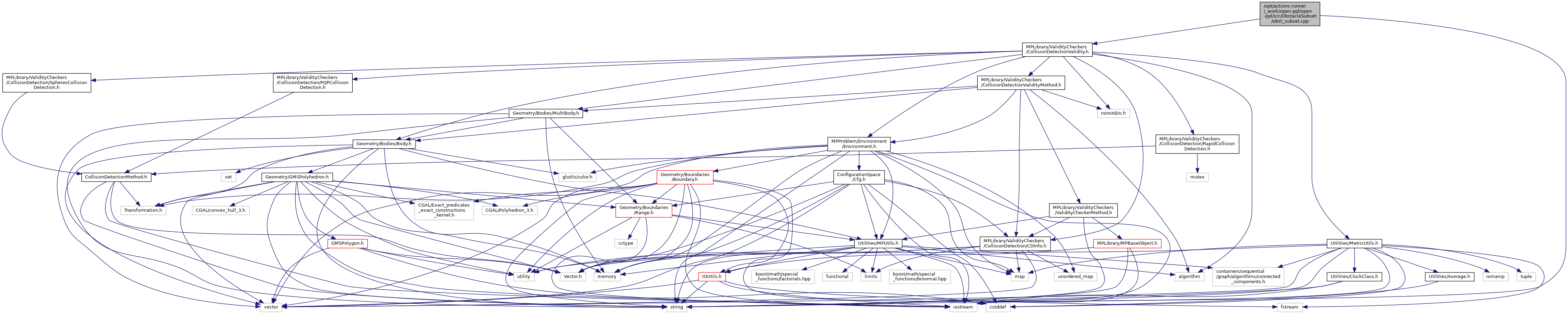
obst_subset.cpp File Reference
#include <iostream>
#include "
MPLibrary/ValidityCheckers/CollisionDetectionValidity.h
"
Include dependency graph for obst_subset.cpp:
Functions
int
main
(int argc, char const *argv[])
Function Documentation
◆
main()
int main
(
int
argc
,
char const *
argv
[]
)
Generated by
1.9.1