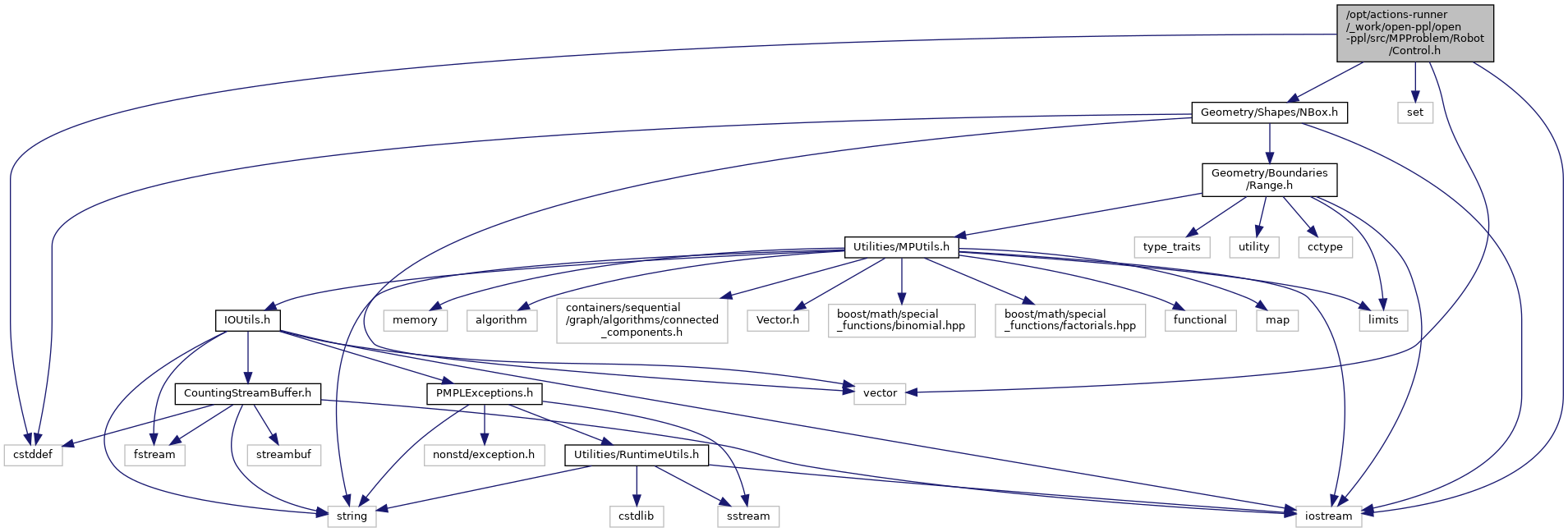
#include <cstddef>
#include <iostream>
#include <set>
#include <vector>
#include "Geometry/Shapes/NBox.h"
Go to the source code of this file.
◆ ControlSet
A discrete set of controls can be defined by a sequence of allowed controls.
◆ ControlSpace
A continuous space of controls can be defined by an N-dimensional box in C-space.
◆ AggregatedControlVector()
| std::vector<double> AggregatedControlVector |
( |
const ControlSet & |
_controls | ) |
|
When dealing with hardware it is often more convenient to have a single force/velocity vector, depending on how the robot model will be set up. This helper converts a control set to a single summed force/velocity vector.
- Parameters
-
| _controls | The control set. |
- Returns
- An aggregated output vector (force/velocity according to actuator type).
◆ operator<<()
| std::ostream& operator<< |
( |
std::ostream & |
_os, |
|
|
const Control & |
_c |
|
) |
| |
Display function for debugging controls and roadmap output. Prints the signal.