|
Parasol Planning Library (PPL)
|
|
Parasol Planning Library (PPL)
|
#include <Control.h>
Public Types | |
Local Types | |
| typedef std::vector< double > | Signal |
Public Member Functions | |
Construction | |
| Control () | |
| Control (Actuator *const _actuator, const Signal &_signal=Signal()) | |
| Control (const Control &)=default | |
| Control (Control &&)=default | |
Assignment | |
| Control & | operator= (const Control &)=default |
| Control & | operator= (Control &&)=default |
Planning Interface | |
| std::vector< double > | GetOutput () const |
Ordering and Equality | |
| bool | operator< (const Control &_rhs) const noexcept |
| Define a weak ordering over controls to allow sorting/sequencing. More... | |
| bool | operator== (const Control &_rhs) const noexcept |
| Define equality operators to check against identical controls. More... | |
| bool | operator!= (const Control &_rhs) const noexcept |
Data Fields | |
Public Data | |
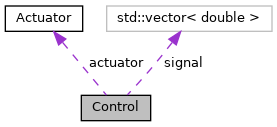
| Actuator * | actuator {nullptr} |
| The actuator for this control. More... | |
| Signal | signal |
| The signal for this control. More... | |
Models the instructions that a robot sends to its actuators.
A control is modeled as a 'relative power' signal for each of the robot's DOFs. Controls are sent to a specific actuator. A strength in the range [-1:1] describes how to drive the actuator's mechanism for that DOF, with -1 representing full reverse and 1 representing full forward.
| typedef std::vector<double> Control::Signal |
|
default |
Construct control
| _actuator | The actuator for this control. |
| _signal | The signal for this control. |
|
default |
|
default |
| std::vector< double > Control::GetOutput | ( | ) | const |
Ask the actuator to compute the generalized force for this control. If not actuator, returns a 0 force vector
|
noexcept |
|
noexcept |
Define a weak ordering over controls to allow sorting/sequencing.
|
noexcept |
Define equality operators to check against identical controls.
| Actuator* Control::actuator {nullptr} |
The actuator for this control.
| Signal Control::signal |
The signal for this control.