#include <cstddef>
#include <iostream>
#include <vector>
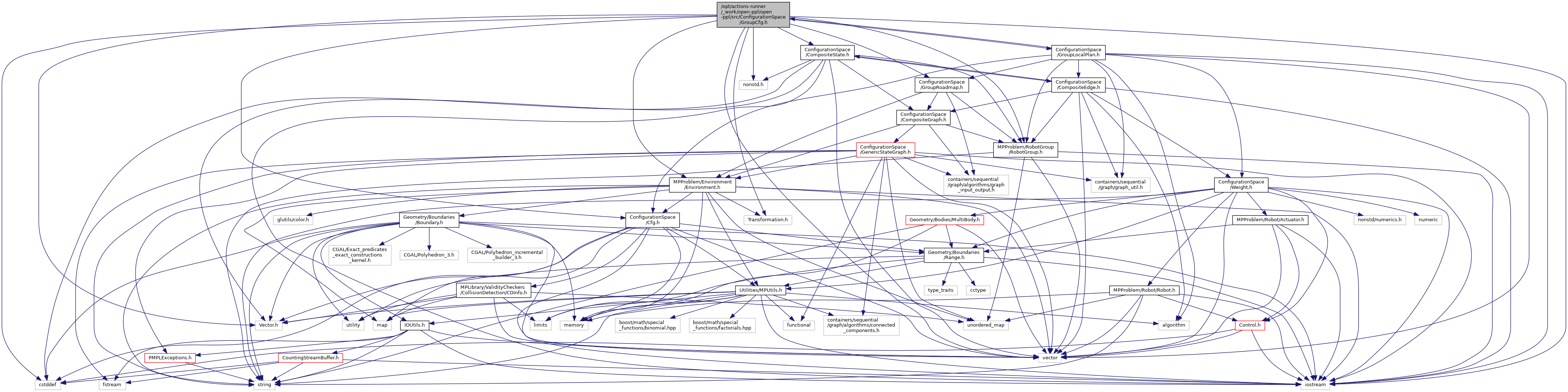
#include "ConfigurationSpace/Cfg.h"
#include "ConfigurationSpace/CompositeState.h"
#include "ConfigurationSpace/GroupLocalPlan.h"
#include "ConfigurationSpace/GroupRoadmap.h"
#include "MPProblem/Environment/Environment.h"
#include "MPProblem/RobotGroup/RobotGroup.h"
#include "nonstd.h"
#include "Transformation.h"
#include "Vector.h"
Go to the source code of this file.
|
| template<typename GraphType > |
| std::ostream & | operator<< (std::ostream &_os, const GroupCfg< GraphType > &_groupCfg) |
| |
◆ operator<<()
template<typename GraphType >
| std::ostream& operator<< |
( |
std::ostream & |
_os, |
|
|
const GroupCfg< GraphType > & |
_groupCfg |
|
) |
| |