|
Parasol Planning Library (PPL)
|
|
Parasol Planning Library (PPL)
|
#include <GroupCfg.h>
Public Types | |
Local Types | |
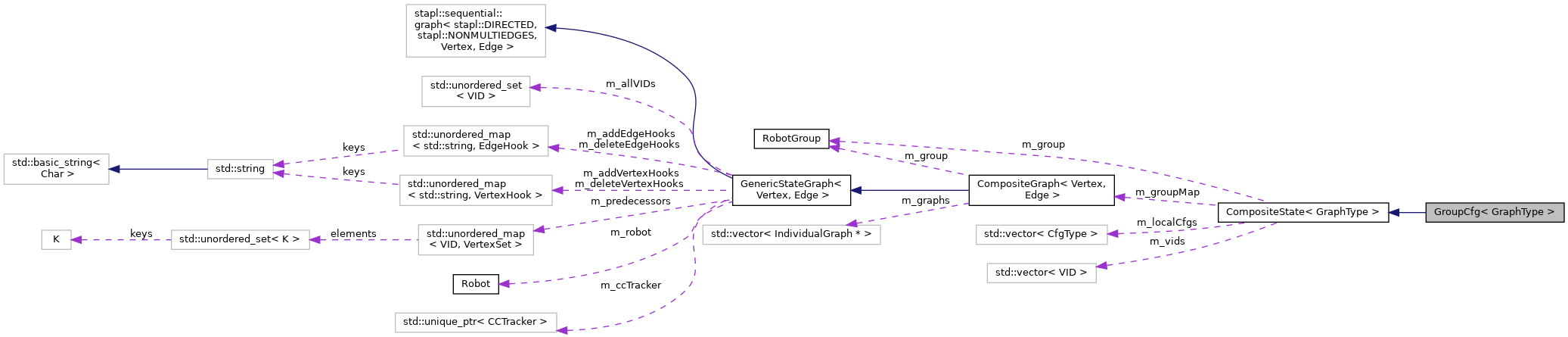
| typedef CompositeState< GraphType > | BaseType |
| typedef GroupRoadmap< GroupCfg, GroupLocalPlan< GraphType > > | GroupRoadmapType |
| typedef BaseType::VID | VID |
| typedef BaseType::GroupGraphType | GroupGraphType |
| typedef BaseType::CfgType | IndividualCfg |
| typedef std::vector< size_t > | Formation |
 Public Types inherited from CompositeState< GraphType > Public Types inherited from CompositeState< GraphType > | |
| typedef size_t | VID |
| A VID in an individual graph. More... | |
| typedef std::vector< VID > | VIDSet |
| A set of VIDs from indiv. graphs. More... | |
| typedef GraphType::CfgType | CfgType |
| The indiv. graph vertex type. More... | |
| typedef CompositeEdge< GraphType > | CompositeEdgeType |
| typedef CompositeGraph< CompositeState, CompositeEdgeType > | GroupGraphType |
| typedef GraphType | IndividualGraph |
Public Member Functions | |
Construction | |
| GroupCfg (GroupRoadmapType *const &_groupMap=nullptr) | |
| GroupCfg (RobotGroup *const &_group) | |
Equality | |
| bool | operator== (const GroupCfg &_other) const noexcept |
| bool | operator< (const GroupCfg &_other) const noexcept |
Arithmetic | |
| GroupCfg | operator+ (const GroupCfg &_other) const |
| GroupCfg | operator- (const GroupCfg &_other) const |
| GroupCfg | operator* (const double &_other) const |
| GroupCfg & | operator+= (const GroupCfg &_other) |
| GroupCfg & | operator-= (const GroupCfg &_other) |
| GroupCfg & | operator*= (const double &_val) |
Roadmap Accessors | |
These functions provide access to the related group map (if any) and descriptors for non-local individual configurations. | |
| GroupRoadmapType * | GetGroupRoadmap () const noexcept |
| Get the group roadmap this group cfg is with respect to. More... | |
| void | SetGroupRoadmap (GroupRoadmapType *const _newRoadmap) |
DOF Accessors | |
| bool | IsNonholonomic () const noexcept |
| Check if there is a nonholonomic robot in the group. More... | |
| size_t | CompositeDOF () const |
| Compute the total DOF for this robot group. More... | |
| double | Magnitude () const |
| Compute the composite magnitude. More... | |
| double | PositionMagnitude () const |
| Compute the composite manitude of the positional components. More... | |
| double | OrientationMagnitude () const |
| Compute the composite magnitude of the orientation components. More... | |
Configuration Helpers | |
| void | ConfigureRobot () const |
| bool | WithinResolution (const GroupCfg &_cfg, const double _posRes, const double _oriRes) const |
DOF Modifiers | |
| void | RotateFormationAboutLeader (const Formation &_robotList, const mathtool::Orientation &_rotation, const bool _debug=false) |
| void | ApplyTransformationForRobots (const Formation &_robotList, const mathtool::Transformation &_transform, const mathtool::Transformation &_relativeTransform=mathtool::Transformation()) |
| void | AddDofsForRobots (const std::vector< double > &_dofs, const Formation &_robots) |
| void | AddDofsForRobots (const mathtool::Vector3d &_dofs, const Formation &_robots) |
| void | OverwriteDofsForRobots (const std::vector< double > &_dofs, const Formation &_robots) |
| void | OverwriteDofsForRobots (const mathtool::Vector3d &_dofs, const Formation &_robots) |
| void | OverwriteDofsForRobots (const GroupCfg &_fromCfg, const Formation &_robots) |
| void | OverwriteDofsForRobots (const GroupCfg &_fromCfg, const std::vector< Robot * > &_robots) |
| void | SetData (const std::vector< double > &_dofs) |
| void | FindIncrement (const GroupCfg &_start, const GroupCfg &_goal, const int _nTicks) |
| void | FindIncrement (const GroupCfg &_start, const GroupCfg &_goal, int *const _nTicks, const double _positionRes, const double _orientationRes) |
| bool | InBounds (const Boundary *const _b) const noexcept |
| bool | InBounds (const Environment *const _env) const noexcept |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| void | GetRandomGroupCfg (const Boundary *const _b) |
| void | GetRandomGroupCfg (Environment *_env) |
| template<typename DistanceMetricPointer > | |
| void | GetRandomRay (const double _length, DistanceMetricPointer _dm, const bool _norm=true) |
| virtual void | NormalizeOrientation (const std::vector< size_t > &_robots={}) noexcept |
| Normalize Orientation DOFs for a Group Cfg. More... | |
Output Utilities | |
| std::string | PrettyPrint (const size_t _precision=4) const |
| Public Member Functions inherited from CompositeState< GraphType > | |
| CompositeState (GroupGraphType *const _groupGraph=nullptr) | |
| CompositeState (RobotGroup *const _group) | |
| virtual bool | operator== (const CompositeState &_other) const noexcept |
| virtual bool | operator!= (const CompositeState &_other) const noexcept |
| virtual size_t | GetNumRobots () const noexcept |
| Get the number of robots in this composite state. More... | |
| virtual const std::vector< Robot * > & | GetRobots () const noexcept |
| Get the full vector of robot pointers. More... | |
| virtual Robot * | GetRobot (const size_t _index) const |
| virtual GroupGraphType * | GetGroupGraph () const noexcept |
| Get the group graph this composite state is with respect to. More... | |
| virtual void | SetGroupGraph (GroupGraphType *_newGraph) |
| Set the composite graph that this composite state exists within. More... | |
| virtual VID | GetVID (const size_t _index) const noexcept |
| virtual VID | GetVID (Robot *const _robot) const |
| virtual void | SetRobotCfg (Robot *const _robot, const VID _vid) |
| virtual void | SetRobotCfg (const size_t _index, const VID _vid) |
| virtual void | SetRobotCfg (Robot *const _robot, CfgType &&_cfg) |
| virtual void | SetRobotCfg (const size_t _index, CfgType &&_cfg) |
| virtual CfgType & | GetRobotCfg (Robot *const _robot) |
| virtual CfgType & | GetRobotCfg (const size_t _index) |
| virtual const CfgType & | GetRobotCfg (Robot *const _robot) const |
| virtual const CfgType & | GetRobotCfg (const size_t _index) const |
| void | ClearLocalCfgs () |
| Clear the Local Cfg information. More... | |
Additional Inherited Members | |
| Protected Member Functions inherited from CompositeState< GraphType > | |
| virtual void | VerifyIndex (const size_t _robotIndex) const noexcept |
| virtual bool | IsLocalCfg (const size_t _robotIndex) const noexcept |
| Protected Attributes inherited from CompositeState< GraphType > | |
| GroupGraphType * | m_groupMap {nullptr} |
| The group graph. More... | |
| RobotGroup * | m_group {nullptr} |
| The robot group for this state. More... | |
| VIDSet | m_vids |
| The individual VIDs in this aggregate state. More... | |
| std::vector< CfgType > | m_localCfgs |
| Individual states not in a map. More... | |
An aggregate configuration which represents a configuration for each robot in a robot group.
The main point of group cfg is to take advantage of everything implemented for individual robots. This means that we use VIDs from individual roadmaps to keep track of the robot cfgs referred to in a group cfg. In the case that a group cfg is modified or new in some way, there is a temporary local storage (m_localCfgs) which stores individual cfgs not yet in a roadmap. When adding a group cfg to a group roadmap, the VID is used in place after adding the individual cfg to the individual roadmap.
'GraphType' represents the individual roadmap type for a single robot.
| typedef CompositeState<GraphType> GroupCfg< GraphType >::BaseType |
A formation represents a group of robots which are maintaining their configurations relative to a leader, such as maintaining a square or V-shape while moving. The values are robot indexes (within the group, not problem) with the first index denoting the leader robot. These are not stored in configurations but may be required for edges.
| typedef BaseType::GroupGraphType GroupCfg< GraphType >::GroupGraphType |
| typedef GroupRoadmap<GroupCfg, GroupLocalPlan<GraphType> > GroupCfg< GraphType >::GroupRoadmapType |
| typedef BaseType::CfgType GroupCfg< GraphType >::IndividualCfg |
| typedef BaseType::VID GroupCfg< GraphType >::VID |
|
explicit |
Construct a group configuration.
| _groupMap | The group roadmap to which this configuration belongs, or null if it is not in a map. |
|
explicit |
Construct a group configuration.
| _group | The group to which this configuration belongs. |
| void GroupCfg< GraphType >::AddDofsForRobots | ( | const mathtool::Vector3d & | _dofs, |
| const Formation & | _robots | ||
| ) |
This function adds all positional dofs in _dofs. It will handle 1-3 dofs based on each IndividualCfg's PosDof value. Does not add in orientation. Note: This function is slightly more efficient than the std::vector version, as we do not need to check the size of _dofs.
| _dofs | The positional values to add in to each body. |
| _robots | This list of bodies to update. Order doesn't matter. |
| void GroupCfg< GraphType >::AddDofsForRobots | ( | const std::vector< double > & | _dofs, |
| const Formation & | _robots | ||
| ) |
Given this configuration, add in the same DOF values to each body given. It assumes that all robots in the formation given have the same DOFs. This is a common thing to do in assembly planning/composite C-Spaces.
| _dofs | The values to add in to each body. This function assumes each body has #dofs = _dofs.size(). |
| _robots | This list of bodies to update. Order doesn't matter. |
| void GroupCfg< GraphType >::ApplyTransformationForRobots | ( | const Formation & | _robotList, |
| const mathtool::Transformation & | _transform, | ||
| const mathtool::Transformation & | _relativeTransform = mathtool::Transformation() |
||
| ) |
Given this GroupCfg as the starting configuration, this function applies a transformation uniformly over all robots listed. Note: Currently assumes all robots just have ONE body. The case of multi- bodied robots would need to be specially handled (right now it should just be split into multiple robots if a group is needed). Note: This is assuming 6 DOFs!
| _robotList | This list of bodies to rotate. First one is leader body. |
| _transform | The change in orientation that should be applied to _cfg. |
| _relativeTransform | (Optional) The transformation to "undo" before applying _transform. If default, it will be a simple transform application. See RotateFormationAboutLeader for usage example. |
| size_t GroupCfg< GraphType >::CompositeDOF |
Compute the total DOF for this robot group.
| void GroupCfg< GraphType >::ConfigureRobot |
Configure each individual cfg that this group cfg represents. This is for template cooperation and is also a needed function before dealing with CD calls and such. Note this will throw an exception if no cfg is present for any robot.
| void GroupCfg< GraphType >::FindIncrement | ( | const GroupCfg< GraphType > & | _start, |
| const GroupCfg< GraphType > & | _goal, | ||
| const int | _nTicks | ||
| ) |
Find the c-space increment and number of steps needed to move from a start to a goal, taking steps no larger than the designated resolutions.
| _start | The start configuration. |
| _goal | The goal configuration. |
| _nTicks | The number of steps to take (NOT computed by this method) |
| void GroupCfg< GraphType >::FindIncrement | ( | const GroupCfg< GraphType > & | _start, |
| const GroupCfg< GraphType > & | _goal, | ||
| int *const | _nTicks, | ||
| const double | _positionRes, | ||
| const double | _orientationRes | ||
| ) |
Find the c-space increment and number of steps needed to move from a start to a goal, taking steps no larger than the designated resolutions.
| _start | The start configuration. |
| _goal | The goal configuration. |
| _nTicks | The number of steps to take (computed by this method). |
| _positionRes | The position resolution to use. |
| _orientationRes | The orientation resolution to use. |
|
noexcept |
Get the group roadmap this group cfg is with respect to.
| void GroupCfg< GraphType >::GetRandomGroupCfg | ( | const Boundary *const | _b | ) |
Create a group configuration where every vertex of every robots is guaranteed to lie within the specified boundary. If a group cfg cannot be found, the program will abort. The function will try a predefined number of times.
| _b | The bondary to sample within. |
| void GroupCfg< GraphType >::GetRandomGroupCfg | ( | Environment * | _env | ) |
Create a group cfg where all robots are guaranteed to lie within the input environment.
| _env | The environment to sample within. |
| void GroupCfg< GraphType >::GetRandomRay | ( | const double | _length, |
| DistanceMetricPointer | _dm, | ||
| const bool | _norm = true |
||
| ) |
Generate a random configuration for group robotswith a set length.
| _length | The desired length. |
| _dm | The distance metric for checking length. |
| _norm | Normalize the orientation DOFs? |
|
noexcept |
Test if a group configuration lies within a boundary and also within the robot's c-space limits.
| _boundary | The boundary to check. |
|
noexcept |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
|
noexcept |
Check if there is a nonholonomic robot in the group.
| double GroupCfg< GraphType >::Magnitude |
Compute the composite magnitude.
|
virtualnoexcept |
Normalize Orientation DOFs for a Group Cfg.
| GroupCfg< GraphType > GroupCfg< GraphType >::operator* | ( | const double & | _other | ) | const |
Find the product of the current and a given group configuration, by each degree of freedom.
| _other | The group configuration used to multiply the current. |
| GroupCfg< GraphType > & GroupCfg< GraphType >::operator*= | ( | const double & | _val | ) |
Multiply the current group configuration by a scalar.
| _val | The scalar used to multiply the current. |
| GroupCfg< GraphType > GroupCfg< GraphType >::operator+ | ( | const GroupCfg< GraphType > & | _other | ) | const |
Find the sum of the current and a given group configuration, by each degree of freedom.
| _other | The group configuration to be added. |
| GroupCfg< GraphType > & GroupCfg< GraphType >::operator+= | ( | const GroupCfg< GraphType > & | _other | ) |
Add a given group configuration to the current, by each degree of freedom.
| _other | The group configuration to be added. |
| GroupCfg< GraphType > GroupCfg< GraphType >::operator- | ( | const GroupCfg< GraphType > & | _other | ) | const |
Find the difference of the current and a given group configuration, by each degree of freedom.
| _other | The group configuration to be subtracted. |
| GroupCfg< GraphType > & GroupCfg< GraphType >::operator-= | ( | const GroupCfg< GraphType > & | _other | ) |
Subtract a given group configuration from the current, by each degree of freedom.
| _other | The group configuration to be subtracted. |
|
noexcept |
Check if the current group cfg is less than the given group cfg.
| _other | The given group configuration. |
|
noexcept |
Check if the current and given group configurations are equal.
| _other | The given group configuration. |
| double GroupCfg< GraphType >::OrientationMagnitude |
Compute the composite magnitude of the orientation components.
| void GroupCfg< GraphType >::OverwriteDofsForRobots | ( | const GroupCfg< GraphType > & | _fromCfg, |
| const Formation & | _robots | ||
| ) |
Given this and another configuration, copy the DOF values from the other to the DOF values in this one, but only for each given robot indexed.
| _fromCfg | The configuration to take values from. |
| _robots | This list of bodies to update. Order doesn't matter. |
| void GroupCfg< GraphType >::OverwriteDofsForRobots | ( | const GroupCfg< GraphType > & | _fromCfg, |
| const std::vector< Robot * > & | _robots | ||
| ) |
| void GroupCfg< GraphType >::OverwriteDofsForRobots | ( | const mathtool::Vector3d & | _dofs, |
| const Formation & | _robots | ||
| ) |
Given new DOF values, overwrite the existing values for each individual cfg in this group cfg that is listed in _robots. Note that _dofs needs to be the same number of DOFs as each individual cfg in the group.
| _fromCfg | The configuration to take values from. |
| _robots | This list of bodies to update. Order doesn't matter. |
| void GroupCfg< GraphType >::OverwriteDofsForRobots | ( | const std::vector< double > & | _dofs, |
| const Formation & | _robots | ||
| ) |
Given new DOF values, overwrite the existing values for each individual cfg in this group cfg that is listed in _robots. Note that _dofs needs to be the same number of DOFs as each individual cfg in the group.
| _fromCfg | The configuration to take values from. |
| _robots | This list of bodies to update. Order doesn't matter. |
| double GroupCfg< GraphType >::PositionMagnitude |
Compute the composite manitude of the positional components.
| std::string GroupCfg< GraphType >::PrettyPrint | ( | const size_t | _precision = 4 | ) | const |
| void GroupCfg< GraphType >::RotateFormationAboutLeader | ( | const Formation & | _robotList, |
| const mathtool::Orientation & | _rotation, | ||
| const bool | _debug = false |
||
| ) |
Given this GroupCfg as the starting configuration, this function applies a rotation to all the robots that are listed, assuming the first one is the formation's leader. Note: Currently assumes all robots just have ONE body. The case of multi- bodied robots would need to be specially handled (right now it should just be split into multiple robots if a group is needed).
| _robotList | This list of bodies to rotate. First one is leader body. |
| _rotation | The change in orientation that should be applied to _cfg. |
| _debug | A flag to print to cout (no access to an m_debug flag here). |
Note: Currently assumes all robots just have ONE body. The case of multi- bodied robots would need to be specially handled (right now it should just be split into multiple robots if a group is needed).
| void GroupCfg< GraphType >::SetData | ( | const std::vector< double > & | _dofs | ) |
Overwrites all data in this cfg, assumes the length of _dofs is the same as CompositeDOF(). Basically just converts a composite C-Space vector into its individual pieces for a Group Cfg.
| void GroupCfg< GraphType >::SetGroupRoadmap | ( | GroupRoadmapType *const | _newRoadmap | ) |
Change the roadmap that this group is using/in reference to. Also performs compatibility/verification tests to see if it's possible.
| bool GroupCfg< GraphType >::WithinResolution | ( | const GroupCfg< GraphType > & | _cfg, |
| const double | _posRes, | ||
| const double | _oriRes | ||
| ) | const |
Check that another GroupCfg is within a resolution as specified.
| _cfg | The test configuration. |
| _posRes | The position resolution. |
| _oriRes | The orientation resolution. |