|
Parasol Planning Library (PPL)
|
|
Parasol Planning Library (PPL)
|
#include "ConfigurationSpace/LocalObstacleMap.h"#include "ConfigurationSpace/GenericStateGraph.h"#include "ConfigurationSpace/GroupRoadmap.h"#include "ConfigurationSpace/GroupPath.h"#include "ConfigurationSpace/Path.h"#include "MPProblem/Robot/Robot.h"#include "MPProblem/RobotGroup/RobotGroup.h"#include "Utilities/MetricUtils.h"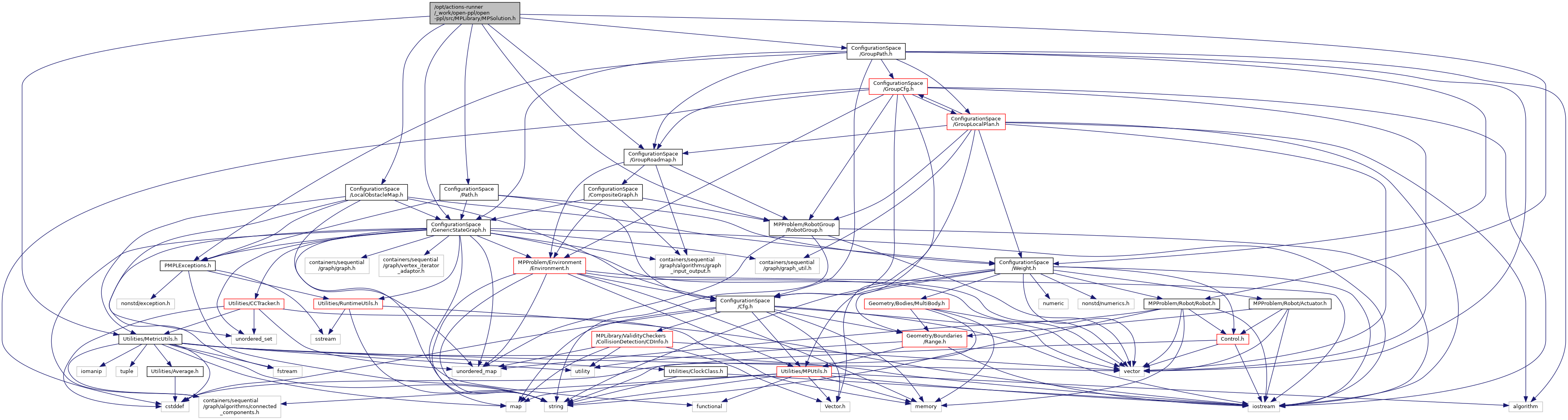

Go to the source code of this file.
Data Structures | |
| class | MPSolutionType |
| struct | MPSolutionType::RobotSolution |
| The outputs for an individual robot. More... | |
| struct | MPSolutionType::GroupSolution |
| The outputs for a robot group. More... | |