|
Parasol Planning Library (PPL)
|
|
Parasol Planning Library (PPL)
|
#include <Environment.h>
Public Types | |
Local Types | |
| typedef std::unordered_map< std::string, std::vector< Terrain > > | TerrainMap |
Public Member Functions | |
Construction | |
| Environment () | |
| Environment (XMLNode &_node) | |
| Environment (const Environment &_other) | |
| Copy. More... | |
| Environment (Environment &&_other) | |
| Move. More... | |
| virtual | ~Environment () |
Assignment | |
| Environment & | operator= (const Environment &_other) |
| Copy. More... | |
| Environment & | operator= (Environment &&_other) |
| Move. More... | |
I/O | |
| const std::string & | GetEnvFileName () const noexcept |
| Get the environment file name. More... | |
| void | ReadXMLOptions (XMLNode &_node) |
| Parse XML options from the Problem XML node. More... | |
| void | ReadXML (XMLNode &_node) |
| Parse XML environment file. More... | |
| void | Read (std::string _filename) |
| void | Print (std::ostream &_os) const |
| void | Write (std::ostream &_os) |
Resolutions | |
| void | ComputeResolution (const std::vector< std::unique_ptr< Robot >> &_robots) |
| double | GetPositionRes () const noexcept |
| Get the position resolution. More... | |
| void | SetPositionRes (double _res) noexcept |
| Set the position resolution. More... | |
| double | GetOrientationRes () const noexcept |
| Get the orientation resolution. More... | |
| void | SetOrientationRes (double _res) noexcept |
| Set the orientation resolution. More... | |
| double | GetTimeRes () const noexcept |
| Get the time resolution. More... | |
Boundary Functions | |
| Boundary * | GetBoundary () const noexcept |
| Get the single boundary of the environemnt. More... | |
| void | SetBoundary (std::unique_ptr< Boundary > &&_b) noexcept |
Obstacle Functions | |
| size_t | NumObstacles () const noexcept |
| Get the number of MultiBodies. More... | |
| MultiBody * | GetObstacle (size_t _index) const |
| MultiBody * | GetRandomObstacle () const |
| size_t | AddObstacle (const std::string &_dir, const std::string &_filename, const mathtool::Transformation &_t=mathtool::Transformation()) |
| void | RemoveObstacle (const size_t _position) |
| void | RemoveObstacle (MultiBody *const _obst) |
| std::map< mathtool::Vector3d, std::vector< size_t > > | ComputeObstacleVertexMap () const |
| bool | UsingBoundaryObstacle () const noexcept |
| Check if the boundary is also modeled as an obstacle. More... | |
Terrain Functions | |
| const TerrainMap & | GetTerrains () const noexcept |
| Get environment terrains. More... | |
Protected Member Functions | |
Helpers | |
| void | InitializeBoundary (std::string _type, const std::string _where) |
| void | CreateBoundaryObstacle () |
| Create an obstacle for the boundary. More... | |
Protected Attributes | |
File Info | |
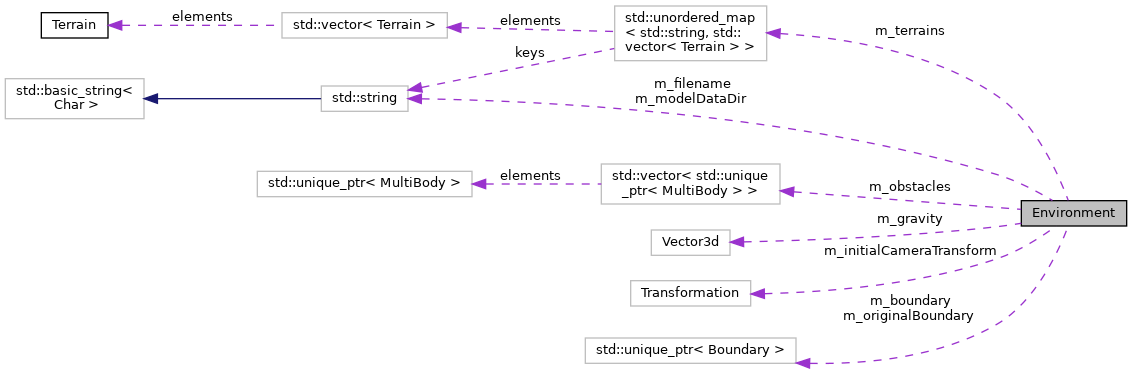
| std::string | m_filename |
| Which file did this environment come from? More... | |
| std::string | m_modelDataDir |
| Directory where environment file is located. More... | |
Resolution Info | |
| double | m_positionRes {-1.} |
| Positional resolution of movement. More... | |
| double | m_orientationRes {.05} |
| Rotational resolution of movement. More... | |
| double | m_timeRes {.05} |
| Resolution for time. More... | |
Models | |
| std::unique_ptr< Boundary > | m_boundary |
| Workspace boundary. More... | |
| std::vector< std::unique_ptr< MultiBody > > | m_obstacles |
| Obstacle multibodies. More... | |
| bool | m_boundaryObstacle {false} |
| Use the boundary as an obstacle? More... | |
Terrains | |
| TerrainMap | m_terrains |
| Environment terrains. More... | |
Simulation Properties | |
| mathtool::Transformation | m_initialCameraTransform |
| Camera starts here. More... | |
Simulation Functions | |
| std::unique_ptr< Boundary > | m_originalBoundary |
| const mathtool::Transformation & | GetInitialCameraTransformation () const noexcept |
| Get the initial transformation for the camera. More... | |
| bool | IsolateTerrain (Cfg start, Cfg goal) |
| IROS Hacks. More... | |
| bool | SameTerrain (Cfg _start, Cfg _goal) |
| void | RestoreBoundary () |
| Restores original boundary. More... | |
| void | SaveBoundary () |
| Saves boundary as original boundary. More... | |
Physical Properties | |
| double | m_frictionCoefficient {0} |
| The uniform friction coefficient. More... | |
| mathtool::Vector3d | m_gravity |
| The gravity direction and magnitude. More... | |
| double | GetFrictionCoefficient () const noexcept |
| Get the friction coefficient. More... | |
| const mathtool::Vector3d & | GetGravity () const noexcept |
| Get the gravity 3-vector. More... | |
Workspace for the motion planning problem, including a boundary and zero or more obstacles.
| typedef std::unordered_map<std::string, std::vector<Terrain> > Environment::TerrainMap |
|
default |
|
explicit |
| Environment::Environment | ( | const Environment & | _other | ) |
Copy.
|
default |
Move.
|
virtualdefault |
| size_t Environment::AddObstacle | ( | const std::string & | _dir, |
| const std::string & | _filename, | ||
| const mathtool::Transformation & | _t = mathtool::Transformation() |
||
| ) |
Add an obstacle to the environment.
| _dir | Directory for geometry file |
| _filename | Geometry filename |
| _t | Transformation of object |
| std::map< Vector3d, std::vector< size_t > > Environment::ComputeObstacleVertexMap | ( | ) | const |
Compute a mapping of the obstacle vertices.
| void Environment::ComputeResolution | ( | const std::vector< std::unique_ptr< Robot >> & | _robots | ) |
Automatically compute position resolution when not specified.
| _robots | Robots to consider when determining resolution |
|
protected |
Create an obstacle for the boundary.
|
noexcept |
Get the single boundary of the environemnt.
|
noexcept |
Get the environment file name.
|
noexcept |
Get the friction coefficient.
|
noexcept |
Get the gravity 3-vector.
|
noexcept |
Get the initial transformation for the camera.
| MultiBody * Environment::GetObstacle | ( | size_t | _index | ) | const |
Get requested obstacle
| _index | Requested multibody |
|
noexcept |
Get the orientation resolution.
|
noexcept |
Get the position resolution.
| MultiBody * Environment::GetRandomObstacle | ( | ) | const |
Get random multiboy
|
noexcept |
Get environment terrains.
|
noexcept |
Get the time resolution.
|
protected |
Initialize a boundary object of the appropriate type.
| _type | Type of boundary object (box, box2d, sphere, or sphere2d) |
| _where | String for parse exception |
IROS Hacks.
Determine if two configurations are in the same boundary of a terrain and, if so, sets mutual terrain as new boundary
| _start | First configuration |
| _end | Second configuration |
|
noexcept |
Get the number of MultiBodies.
| Environment & Environment::operator= | ( | const Environment & | _other | ) |
Copy.
|
default |
Move.
| void Environment::Print | ( | std::ostream & | _os | ) | const |
Print environment resolutions and boundary information.
| _os | The output stream to print to. |
| void Environment::Read | ( | std::string | _filename | ) |
Parse an old-style environment file.
| _filename | The name of the file to read. |
| void Environment::ReadXML | ( | XMLNode & | _node | ) |
Parse XML environment file.
| void Environment::ReadXMLOptions | ( | XMLNode & | _node | ) |
Parse XML options from the Problem XML node.
| void Environment::RemoveObstacle | ( | const size_t | _position | ) |
Remove an obstacle from the environment.
| _position | Index in m_obstacleBodies to be removed |
| void Environment::RemoveObstacle | ( | MultiBody *const | _obst | ) |
Remove obstacle from environment
| _obst | Obstacle to be removed |
| void Environment::RestoreBoundary | ( | ) |
Restores original boundary.
Determine if two configurations are in the same terrain
| _start | First configuration |
| _end | Second configuration |
| void Environment::SaveBoundary | ( | ) |
Saves boundary as original boundary.
|
noexcept |
Get the single boundary of the environemnt
| _b | The new boundary |
|
noexcept |
Set the orientation resolution.
|
noexcept |
Set the position resolution.
|
noexcept |
Check if the boundary is also modeled as an obstacle.
| void Environment::Write | ( | std::ostream & | _os | ) |
Output environment to .env file format.
| _os | The output stream to write to. |
|
protected |
Workspace boundary.
|
protected |
Use the boundary as an obstacle?
|
protected |
Which file did this environment come from?
|
protected |
The uniform friction coefficient.
|
protected |
The gravity direction and magnitude.
|
protected |
Camera starts here.
|
protected |
Directory where environment file is located.
|
protected |
Obstacle multibodies.
|
protected |
Rotational resolution of movement.
| std::unique_ptr<Boundary> Environment::m_originalBoundary |
|
protected |
Positional resolution of movement.
|
protected |
Environment terrains.
|
protected |
Resolution for time.