|
Parasol Planning Library (PPL)
|
|
Parasol Planning Library (PPL)
|
#include <InteractionInformation.h>
Public Member Functions | |
Construction | |
| InteractionInformation (MPProblem *_problem, XMLNode &_node) | |
Accessors | |
| std::string | GetLabel () const |
| Get label for handoff template. More... | |
| size_t | GetMaxAttempts () const |
| Get max attempts for placing template in real environment. More... | |
| MPProblem * | GetMPProblem () const |
| Get MPProblem for handoff. More... | |
| std::vector< std::shared_ptr< MPTask > > & | GetInteractionTasks () |
| Get interaction tasks for handoff. More... | |
| std::vector< std::shared_ptr< MPTask > > & | GetTypeTasks (const std::string &_s) |
| double | GetInteractionWeight () const |
| Get interaction weight. More... | |
| void | AddTemplateLocation (Cfg _location) |
| std::vector< Cfg > & | GetTemplateLocations () |
| Gets the set of locations to place ITs. More... | |
| std::vector< Cfg > | GetInteractionPositions () |
| Gets the final position of robots at each of the IT locations. More... | |
| std::vector< std::pair< Cfg, Cfg > > | GetInteractionPositionPairs () |
| std::vector< std::vector< Cfg > > | GetInteractionPaths () |
| Gets the paths of robots at each of the IT locations. More... | |
| std::vector< Cfg > | GetInteractionPosition (std::string _capability) |
| Get the final position of robot of input capability. More... | |
| std::vector< std::vector< Cfg > > | GetInteractionPath (std::string _capability) |
| Get the paths of robot of input capability. More... | |
| bool | SavedPaths () |
| Environment * | GetInteractionEnvironment () |
| Gets the environment to plan the interaction in. More... | |
Protected Attributes | |
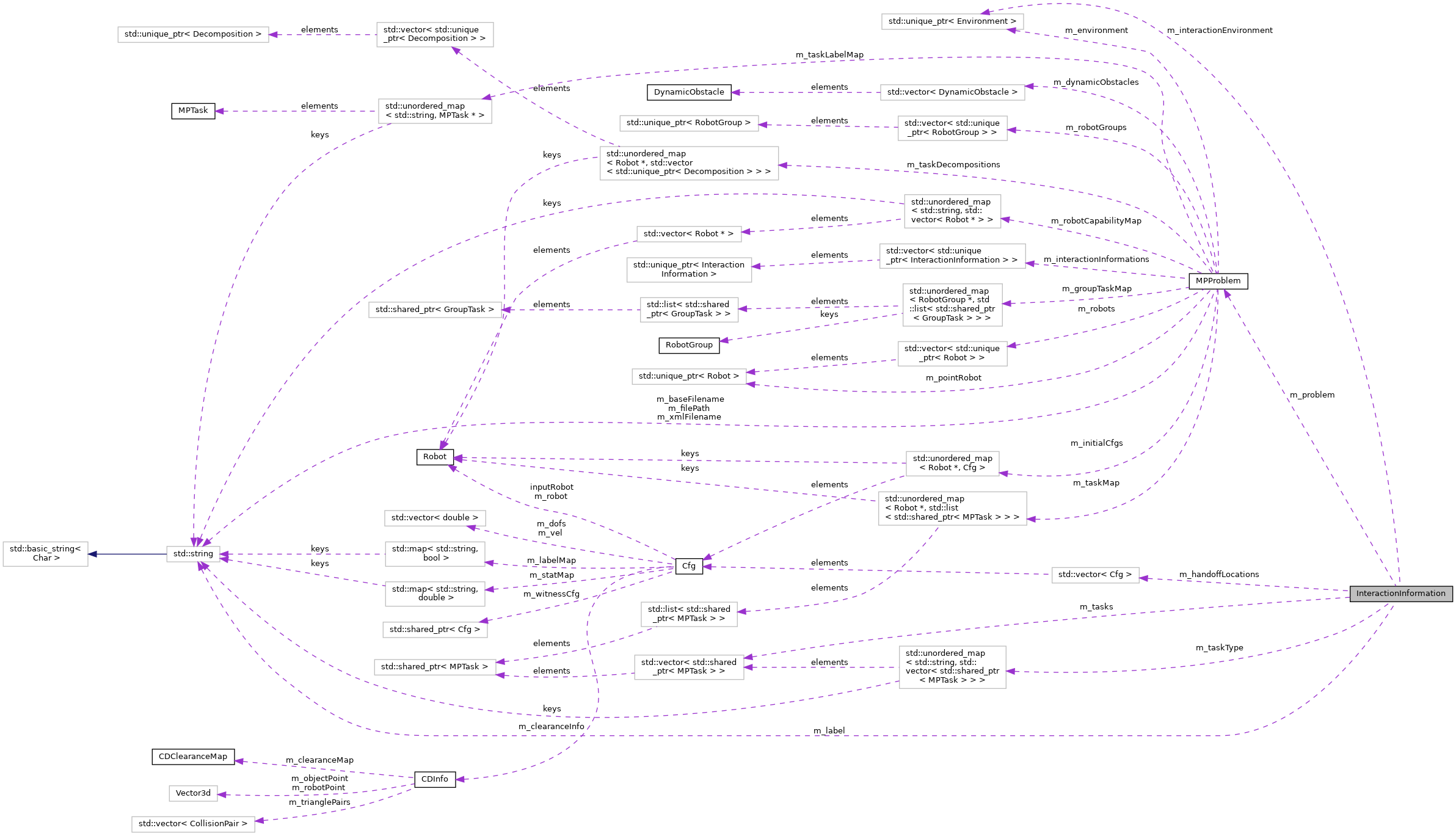
| MPProblem * | m_problem {nullptr} |
| The handoff template problem. More... | |
| std::vector< std::shared_ptr< MPTask > > | m_tasks |
| The set of tasks that must be performed to handoff. More... | |
| std::unordered_map< std::string, std::vector< std::shared_ptr< MPTask > > > | m_taskType |
| The list of tasks stored by type. More... | |
| std::string | m_label |
| The handoff label. More... | |
| size_t | m_maxAttempts |
| The number of attempts to try and place the template in the environment. More... | |
| double | m_interactionWeight {0} |
| The weight of the edge between interaction cfgs. More... | |
| std::vector< Cfg > | m_handoffLocations |
| The locations for manually placed handoffs. More... | |
| std::unique_ptr< Environment > | m_interactionEnvironment |
| Environment to plan the interaction in. More... | |
| bool | m_savePaths |
This represents a Handoff Template, which stores the tasks required for robots to perform a handoff.
| void InteractionInformation::AddTemplateLocation | ( | Cfg | _location | ) |
Adds an addition location to place an IT
| _location | Location to add to handoff locations |
| Environment * InteractionInformation::GetInteractionEnvironment | ( | ) |
Gets the environment to plan the interaction in.
| std::vector<std::vector<Cfg> > InteractionInformation::GetInteractionPath | ( | std::string | _capability | ) |
Get the paths of robot of input capability.
| std::vector<std::vector<Cfg> > InteractionInformation::GetInteractionPaths | ( | ) |
Gets the paths of robots at each of the IT locations.
| std::vector<Cfg> InteractionInformation::GetInteractionPosition | ( | std::string | _capability | ) |
Get the final position of robot of input capability.
Gets the final position of robot pairs at each of the IT locations. First is the robot handing off. Second is robot receving.
| std::vector<Cfg> InteractionInformation::GetInteractionPositions | ( | ) |
Gets the final position of robots at each of the IT locations.
| std::vector< std::shared_ptr< MPTask > > & InteractionInformation::GetInteractionTasks | ( | ) |
Get interaction tasks for handoff.
| double InteractionInformation::GetInteractionWeight | ( | ) | const |
Get interaction weight.
| std::string InteractionInformation::GetLabel | ( | ) | const |
Get label for handoff template.
| size_t InteractionInformation::GetMaxAttempts | ( | ) | const |
Get max attempts for placing template in real environment.
| std::vector< Cfg > & InteractionInformation::GetTemplateLocations | ( | ) |
Gets the set of locations to place ITs.
| std::vector< std::shared_ptr< MPTask > > & InteractionInformation::GetTypeTasks | ( | const std::string & | _s | ) |
Get all tasks of the given type
| _s | Type of tasks desired |
| bool InteractionInformation::SavedPaths | ( | ) |
Get if paths are saved
|
protected |
The locations for manually placed handoffs.
|
protected |
Environment to plan the interaction in.
|
protected |
The weight of the edge between interaction cfgs.
|
protected |
The handoff label.
|
protected |
The number of attempts to try and place the template in the environment.
|
protected |
The handoff template problem.
|
protected |
Indicates if the interaction template should save the entire paths of the interaction or just the final configurations.
|
protected |
The set of tasks that must be performed to handoff.
|
protected |
The list of tasks stored by type.