#include <CDInfo.h>
Information returned by validity checkers, e.g., distance from obstacles.
- Todo:
- Generalize this object to store collisions with obstacles, boundaries, and other robots in a uniform way. It should contain a vector of 'Collision' structures which describe the object type, indexes, and distance for each detected collision.
- Examples
- CollisionDetection_UseCase.cpp, and ValidityCheckers_UseCase.cpp.
◆ CollisionPair
A pair of triangle indexes on the robot (first) and obstacle (second) in a discovered collision.
◆ CDInfo()
| CDInfo::CDInfo |
( |
const bool |
_retAllInfo = false | ) |
|
- Parameters
-
| _retAllInfo | Compute distance information if possible |
◆ operator<()
| bool CDInfo::operator< |
( |
const CDInfo & |
_cdInfo | ) |
const |
|
noexcept |
Order these objects according to the minimum distance from closest colliding obstacle.
- Parameters
-
- Returns
- True if minimum distance is less than other's minimum distance.
◆ ResetVars()
| void CDInfo::ResetVars |
( |
const bool |
_retAllInfo = false | ) |
|
Reset object to default state.
- Parameters
-
| _retAllInfo | Compute distance information if possible |
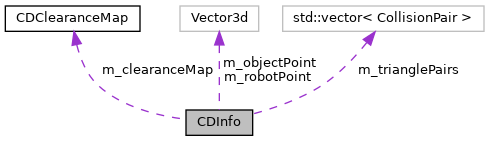
◆ m_clearanceMap
Map of detected clearances.
◆ m_collidingObstIndex
| int CDInfo::m_collidingObstIndex |
Index for first discovered obstacle collision.
◆ m_minDist
Distance between Robot and closest obstacle.
◆ m_nearestObstIndex
| int CDInfo::m_nearestObstIndex |
Index for closest obstacle.
◆ m_objectPoint
| mathtool::Vector3d CDInfo::m_objectPoint |
Closest point on closest obstacle to Robot.
◆ m_retAllInfo
| bool CDInfo::m_retAllInfo |
Consider all collisions or only the first?
◆ m_robotPoint
| mathtool::Vector3d CDInfo::m_robotPoint |
Closest point on Robot to closest obstacle.
◆ m_trianglePairs
All colliding triangle pairs.
The documentation for this struct was generated from the following files:
- /opt/actions-runner/_work/open-ppl/open-ppl/src/MPLibrary/ValidityCheckers/CollisionDetection/CDInfo.h
- /opt/actions-runner/_work/open-ppl/open-ppl/src/MPLibrary/ValidityCheckers/CollisionDetection/CDInfo.cpp