|
Parasol Planning Library (PPL)
|
|
Parasol Planning Library (PPL)
|
#include "Control.h"#include "Actuator.h"#include "Utilities/PMPLExceptions.h"#include "nonstd/io.h"#include "nonstd/numerics.h"#include <algorithm>#include <sstream>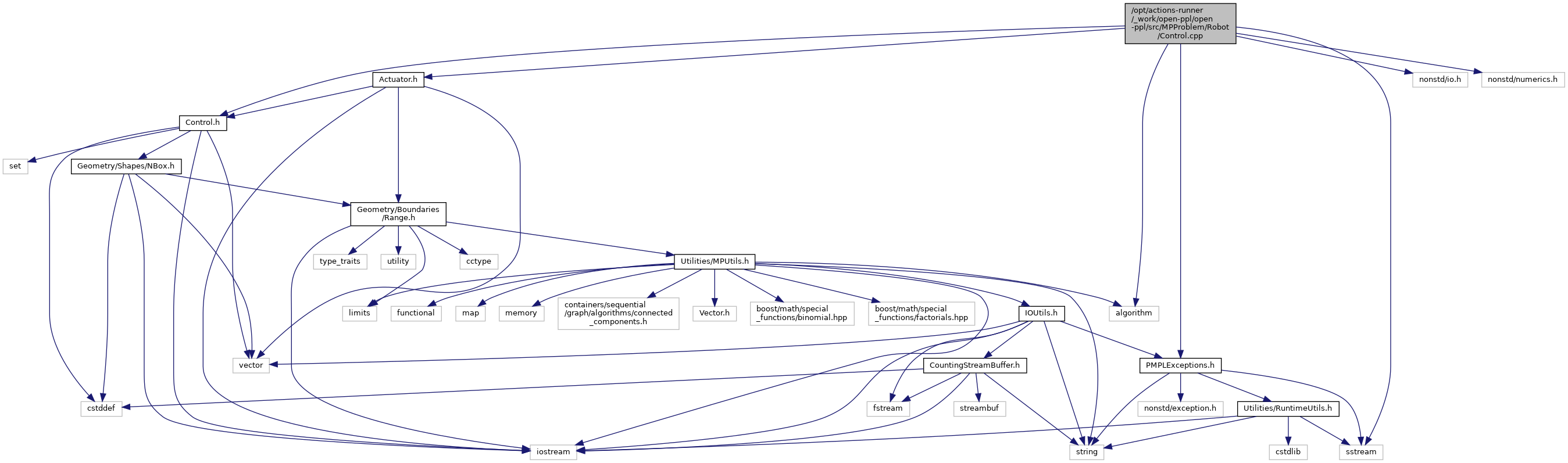
Functions | |
| std::ostream & | operator<< (std::ostream &_os, const Control &_c) |
| Display function for debugging controls and roadmap output. Prints the signal. More... | |
| std::vector< double > | AggregatedControlVector (const ControlSet &_controls) |
| std::vector<double> AggregatedControlVector | ( | const ControlSet & | _controls | ) |
When dealing with hardware it is often more convenient to have a single force/velocity vector, depending on how the robot model will be set up. This helper converts a control set to a single summed force/velocity vector.
| _controls | The control set. |
| std::ostream& operator<< | ( | std::ostream & | _os, |
| const Control & | _c | ||
| ) |
Display function for debugging controls and roadmap output. Prints the signal.