|
Parasol Planning Library (PPL)
|
|
Parasol Planning Library (PPL)
|
#include "Geometry/Bodies/Chain.h"#include "Geometry/Bodies/Connection.h"#include "Geometry/Bodies/MultiBody.h"#include "Geometry/Boundaries/Boundary.h"#include "Geometry/Boundaries/WorkspaceBoundingSphericalShell.h"#include "MPProblem/Robot/Robot.h"#include "ReachableVolumes.h"#include "Transformation.h"#include <algorithm>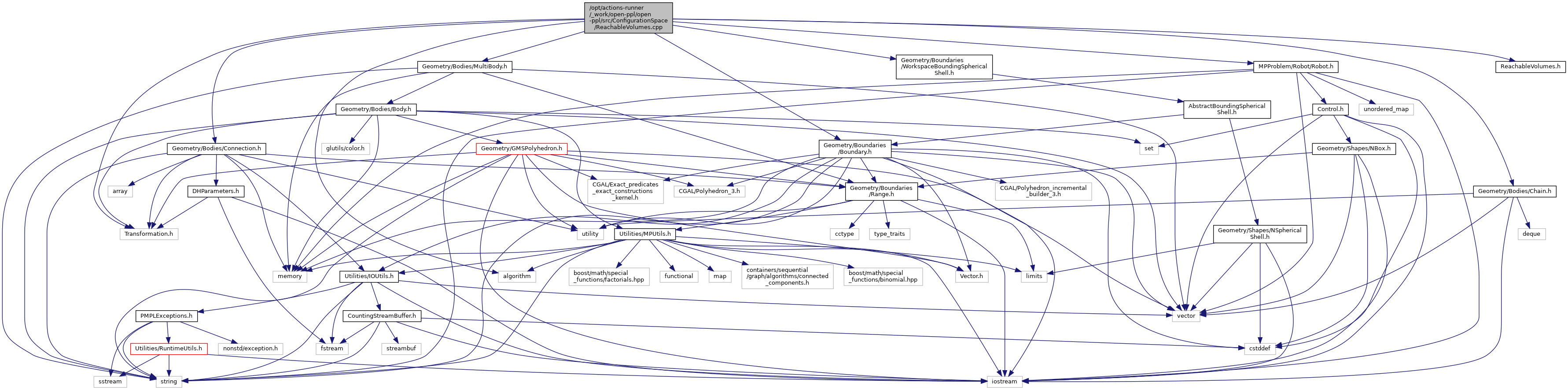
Functions | |
| double | ComputeReachableDistanceOfSingleLink (const size_t _dimension, const Connection *_joint, const Connection *_parent, const Chain *_chain) |
| WorkspaceBoundingSphericalShell | ComputeReachableVolume (const size_t _dimension, const std::vector< double > &_center, const Chain &_chain) |
| double ComputeReachableDistanceOfSingleLink | ( | const size_t | _dimension, |
| const Connection * | _joint, | ||
| const Connection * | _parent, | ||
| const Chain * | _chain | ||
| ) |
Compute the unconstrained reachable distance of one joint in a linear chain, relative to its parent.
| _dimension | The workspace dimension. |
| _joint | The joint to compute the reachable distance for. |
| _parent | The parent of _joint in the current ordering of _chain. |
| _chain | The chain which holds _joint and _parent (may be forward or reverse oriented relative to the multibody). |
| WorkspaceBoundingSphericalShell ComputeReachableVolume | ( | const size_t | _dimension, |
| const std::vector< double > & | _center, | ||
| const Chain & | _chain | ||
| ) |
Compute the reachable volume of a chain.
| _dimension | The workspace dimension. |
| _chain | The chain. |