|
|
| | WorkspaceBoundingSphere (const size_t _n, const double _radius=std::numeric_limits< double >::max()) |
| |
| | WorkspaceBoundingSphere (const std::vector< double > &_center, const double _radius=std::numeric_limits< double >::max()) |
| |
| | WorkspaceBoundingSphere (const Vector3d &_center, const double _radius=std::numeric_limits< double >::max()) |
| |
| | WorkspaceBoundingSphere (XMLNode &_node) |
| |
| virtual | ~WorkspaceBoundingSphere () noexcept |
| |
| virtual std::unique_ptr< Boundary > | Clone () const override |
| |
|
| virtual Boundary::Space | Type () const noexcept override |
| | Get the space type. More...
|
| |
| virtual std::string | Name () const noexcept override |
| | Get the name of the boundary type. More...
|
| |
|
| virtual bool | InBoundary (const Cfg &_cfg) const override |
| |
| virtual bool | InBoundary (const Vector3d &_p) const |
| |
| virtual bool | InBoundary (const std::vector< double > &_v) const=0 |
| |
| virtual bool | InBoundary (const Cfg &_c) const=0 |
| |
|
| virtual GMSPolyhedron | MakePolyhedron () const override |
| | This will be an approximate sphere with 480 faces. More...
|
| |
| | AbstractBoundingSphere (const size_t _n, const double _radius=std::numeric_limits< double >::max()) |
| |
| | AbstractBoundingSphere (const std::vector< double > &_center, const double _radius=std::numeric_limits< double >::max()) |
| |
| | AbstractBoundingSphere (XMLNode &_node) |
| |
| virtual | ~AbstractBoundingSphere () noexcept |
| |
| virtual size_t | GetDimension () const noexcept override |
| | Get the dimension of this boundary. More...
|
| |
| virtual double | GetMaxDist (const double _r1=2.0, const double _r2=0.5) const override |
| |
| virtual const Range< double > & | GetRange (const size_t _i) const override |
| |
| virtual const std::vector< double > & | GetCenter () const noexcept override |
| | Get the boundary's center point. More...
|
| |
| virtual double | GetVolume () const noexcept override |
| | Get the boundary's volume (Lebesgue Measure). More...
|
| |
| virtual std::vector< double > | GetRandomPoint () const override |
| | Get a random point inside the boundary. More...
|
| |
| virtual void | PushInside (std::vector< double > &_sample) const noexcept override |
| |
| virtual bool | InBoundary (const std::vector< double > &_p) const override |
| |
| virtual bool | InBoundary (const Vector3d &_p) const |
| |
| virtual bool | InBoundary (const std::vector< double > &_v) const=0 |
| |
| virtual bool | InBoundary (const Cfg &_c) const=0 |
| |
| virtual double | GetClearance (const Vector3d &_p) const override |
| |
| virtual Vector3d | GetClearancePoint (const Vector3d &_p) const override |
| |
| virtual void | SetCenter (const std::vector< double > &_c) noexcept override |
| |
| virtual void | Translate (const Vector3d &_v) override |
| |
| virtual void | Translate (const std::vector< double > &_t) override |
| |
| virtual void | ResetBoundary (const std::vector< std::pair< double, double >> &_bbx, const double _margin) override |
| |
| virtual void | Read (std::istream &_is, CountingStreamBuffer &_cbs) override |
| |
| virtual void | Write (std::ostream &_os) const override |
| |
| virtual void | ScalePoint (std::vector< double > &_point) const noexcept |
| |
| virtual void | UnscalePoint (std::vector< double > &_point) const noexcept |
| |
| virtual bool | InBoundary (const Vector3d &_p) const |
| |
| virtual CGALPolyhedron | CGAL () const |
| | Create a CGAL polyhedron representation of this. More...
|
| |
| virtual | ~Boundary () noexcept |
| |
| | NSphere (const size_t _n, const double _r=std::numeric_limits< double >::max()) |
| |
| | NSphere (const std::vector< double > &_center, const double _r=std::numeric_limits< double >::max()) |
| |
| virtual | ~NSphere () noexcept |
| |
| size_t | GetDimension () const noexcept |
| | Get the dimension of this sphere. More...
|
| |
| void | SetCenter (const std::vector< double > &_c) noexcept |
| |
| const std::vector< double > & | GetCenter () const noexcept |
| | Get the center point. More...
|
| |
| double | GetRadius () const noexcept |
| | Get the radius. More...
|
| |
| void | SetRadius (const double _r) noexcept |
| | Set the radius. More...
|
| |
| void | Translate (const std::vector< double > &_v) noexcept |
| |
| double | GetVolume () const noexcept |
| | Compute the (hyper)volume or Lebesgue measure. More...
|
| |
| bool | Contains (const std::vector< double > &_p) const noexcept |
| |
| double | Clearance (std::vector< double > _p) const noexcept |
| |
| std::vector< double > | ClearancePoint (std::vector< double > _p) const noexcept |
| |
| std::vector< double > | Sample () const |
| |
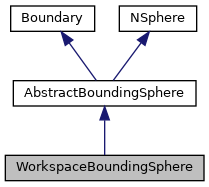
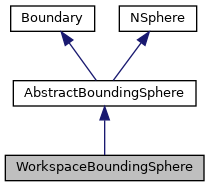
A 2 or 3 dimensional bounding sphere in workspace.
 Public Member Functions inherited from AbstractBoundingSphere
Public Member Functions inherited from AbstractBoundingSphere