|
Parasol Planning Library (PPL)
|
|
Parasol Planning Library (PPL)
|
#include <BoundaryConstraint.h>
Public Member Functions | |
Construction | |
| BoundaryConstraint (Robot *const _r, std::unique_ptr< Boundary > &&_b) | |
| BoundaryConstraint (Robot *const _r, XMLNode &_node) | |
| BoundaryConstraint (const BoundaryConstraint &_other) | |
| virtual | ~BoundaryConstraint () |
| virtual std::unique_ptr< Constraint > | Clone () const override |
Constraint Interface | |
| virtual const Boundary * | GetBoundary () const override |
| virtual bool | Satisfied (const Cfg &_c) const override |
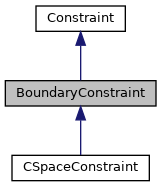
 Public Member Functions inherited from Constraint Public Member Functions inherited from Constraint | |
| virtual void | SetRobot (Robot *const _r) |
| Constraint (Robot *const _r) | |
| virtual | ~Constraint () |
Protected Attributes | |
Internal State | |
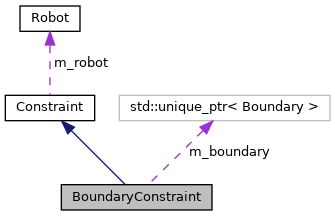
| std::unique_ptr< Boundary > | m_boundary |
| The boundary for this constraint. More... | |
| Protected Attributes inherited from Constraint | |
| Robot * | m_robot {nullptr} |
| The subject of this constraint. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from Constraint | |
| static std::unique_ptr< Constraint > | Factory (Robot *const _r, XMLNode &_node, Environment *_env=nullptr) |
A robot satisfies this constraint if it passes the 'is inside' boundary check. Various boundary types may be considered.
|
explicit |
Construct a constraint from a specific boundary.
| _r | The robot to constrain. |
| _b | The boundary. |
Construct a constraint from an XML node.
| _r | The robot to constrain. |
| _node | The node to parse. |
| BoundaryConstraint::BoundaryConstraint | ( | const BoundaryConstraint & | _other | ) |
|
virtualdefault |
|
overridevirtual |
Copy this constraint.
Implements Constraint.
Reimplemented in CSpaceConstraint.
|
overridevirtual |
Get a sampling boundary that describes the subset of CSpace allowed by this constraint.
Implements Constraint.
|
overridevirtual |
Determine whether a given configuration of the robot satisfies this constraint.
| _c | The configuration to check. |
Implements Constraint.
|
protected |
The boundary for this constraint.