#include <CSpaceConstraint.h>
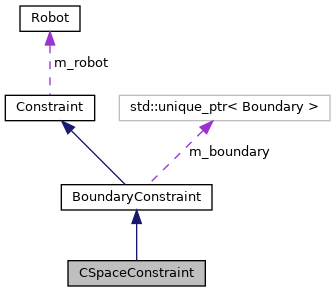
A c-space boundary constraint, mainly provided as a convenience interface for BoundaryConstraint.
◆ CSpaceConstraint() [1/3]
| CSpaceConstraint::CSpaceConstraint |
( |
Robot *const |
_r, |
|
|
const Cfg & |
_c |
|
) |
| |
|
explicit |
Construct a constraint from a specific configuration.
- Parameters
-
| _r | The robot to constrain. |
| _c | The single configuration for _r which satisfies this constraint. |
◆ CSpaceConstraint() [2/3]
Construct a constraint from an XML node.
- Parameters
-
| _r | The robot to constrain. |
| _node | The node to parse. |
- Todo:
- Verify that this works with constraints of lower dimension than the robot's cspace (for partial constraint), or decide that we will not support this and throw an error if requested.
◆ CSpaceConstraint() [3/3]
| CSpaceConstraint::CSpaceConstraint |
( |
Robot *const |
_r, |
|
|
std::string |
_pointString, |
|
|
std::string |
_bbxString |
|
) |
| |
|
explicit |
Construct a constraint from message strings.
- Parameters
-
| _r | The robot to constrain. |
| _pointString | The string containing point constraint info. |
| _bbxString | The string containing bounding box constraint info. |
◆ ~CSpaceConstraint()
| CSpaceConstraint::~CSpaceConstraint |
( |
| ) |
|
|
virtualdefault |
◆ Clone()
| std::unique_ptr< Constraint > CSpaceConstraint::Clone |
( |
| ) |
const |
|
overridevirtual |
Copy this constraint.
- Returns
- A copy of this constraint.
Reimplemented from BoundaryConstraint.
The documentation for this class was generated from the following files:
 Public Member Functions inherited from BoundaryConstraint
Public Member Functions inherited from BoundaryConstraint