|
Parasol Planning Library (PPL)
|
|
Parasol Planning Library (PPL)
|
#include <CBSQuery.h>
Public Types | |
Motion Planning Types | |
| typedef MPBaseObject::RoadmapType | RoadmapType |
| typedef RoadmapType::VID | VID |
| typedef RoadmapType::EdgeID | EdgeID |
 Public Types inherited from MapEvaluatorMethod Public Types inherited from MapEvaluatorMethod | |
| typedef std::unordered_map< size_t, std::unordered_map< size_t, std::vector< Range< double > > > > | EdgeIntervals |
| Public Types inherited from MPBaseObject | |
| typedef DefaultWeight< Cfg > | WeightType |
| typedef GenericStateGraph< Cfg, WeightType > | RoadmapType |
| typedef GroupCfg< RoadmapType > | GroupCfgType |
| typedef GroupLocalPlan< RoadmapType > | GroupWeightType |
| typedef GroupRoadmap< GroupCfgType, GroupWeightType > | GroupRoadmapType |
Public Member Functions | |
Construction | |
| CBSQuery () | |
| CBSQuery (XMLNode &_node) | |
| virtual | ~CBSQuery ()=default |
MPBaseObject Overrides | |
| virtual void | Initialize () override |
MapEvaluator Overrides | |
| virtual bool | operator() () override |
| Public Member Functions inherited from MapEvaluatorMethod | |
| virtual void | SetEdgeIntervals (EdgeIntervals _edgeIntervals) |
| Set the edge intervals of a roadmap. More... | |
| virtual void | SetMinEndtime (double _minEndtime) |
| Set the minimum end time of a path. More... | |
| void | SetActiveRobots (const std::vector< size_t > &_activeRobots) |
| Set the active robots. More... | |
| std::vector< size_t > | GetActiveRobots () const |
| Get the active robots. More... | |
| MapEvaluatorMethod ()=default | |
| MapEvaluatorMethod (XMLNode &_node) | |
| virtual | ~MapEvaluatorMethod ()=default |
| Public Member Functions inherited from MPBaseObject | |
| MPBaseObject (const std::string &_label="", const std::string &_name="", bool _debug=false) | |
| MPBaseObject (XMLNode &_node) | |
| virtual | ~MPBaseObject () |
| virtual void | Print (std::ostream &_os) const |
| const std::string & | GetName () const |
| Get the class name for this object. More... | |
| const std::string & | GetLabel () const |
| Get the unique label for this object. More... | |
| std::string | GetNameAndLabel () const |
| Get the unique string identifier for this object "m_name::m_label". More... | |
| void | SetLabel (const std::string &) |
| Set the unique label for this object. More... | |
| void | SetMPLibrary (MPLibrary *) noexcept |
| Set the owning MPLibrary. More... | |
| MPLibrary * | GetMPLibrary () const noexcept |
| Get the owning MPLibrary. More... | |
| bool | IsRunning () const noexcept |
| Check the library's running flag. More... | |
| MPProblem * | GetMPProblem () const noexcept |
| Get the library's current MPProblem. More... | |
| Environment * | GetEnvironment () const noexcept |
| Get the current environment. More... | |
| MPTask * | GetTask () const noexcept |
| Get the current task. More... | |
| GroupTask * | GetGroupTask () const noexcept |
| Get the current group task. More... | |
| MPSolutionType * | GetMPSolution () const noexcept |
| RoadmapType * | GetRoadmap (Robot *const _r=nullptr) const noexcept |
| Get the current free-space roadmap. More... | |
| GroupRoadmapType * | GetGroupRoadmap (RobotGroup *const _g=nullptr) const noexcept |
| Get the current free-space group roadmap. More... | |
| RoadmapType * | GetBlockRoadmap (Robot *const _r=nullptr) const noexcept |
| Get the current obstacle-space roadmap. More... | |
| Path * | GetPath (Robot *const _r=nullptr) const noexcept |
| GroupPath * | GetGroupPath (RobotGroup *const _g=nullptr) const noexcept |
| Get the current best group path. More... | |
| StatClass * | GetStatClass () const noexcept |
| Get the current StatClass. More... | |
| LocalObstacleMap * | GetLocalObstacleMap () const noexcept |
| Get the local obstacle map. More... | |
Protected Member Functions | |
CBS Functors | |
| Path * | SolveIndividualTask (Robot *const _robot, Node &_node) |
| std::vector< std::pair< Robot *, Constraint > > | ValidationFunction (Node &_node) |
| std::vector< Node > | SplitNodeFunction (Node &_node, std::vector< std::pair< Robot *, Constraint >> _constraints, CBSLowLevelPlanner< Robot, Constraint, Path > &_lowlevel, CBSCostFunction< Robot, Constraint, Path > &_cost) |
| double | CostFunction (Node &_node) |
Helpers | |
| void | ComputeIntervals (Robot *_robot, const Node &_node) |
| std::vector< Range< size_t > > | ConstructSafeIntervals (std::vector< Range< size_t >> &_unsafeIntervals) |
| bool | OverlappingIntervals (Range< size_t > _interval1, Range< size_t > _interval2) |
| Range< double > | MergeIntervals (Range< double > _interval1, Range< double > _interval2) |
| Protected Member Functions inherited from MPBaseObject | |
| void | SetName (const std::string &_s) |
| const std::string & | GetBaseFilename () const |
Protected Attributes | |
Internal State | |
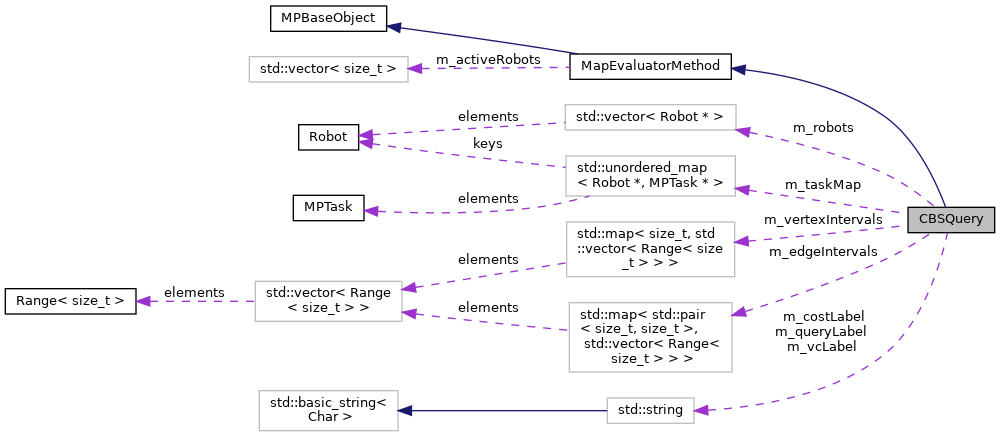
| std::vector< Robot * > | m_robots |
| The robots in the group. More... | |
| std::string | m_queryLabel |
| Query method for making individual plans. More... | |
| std::string | m_vcLabel |
| Validity checker for conflict detection. More... | |
| std::string | m_costLabel = "SOC" |
| The label of the cost function. More... | |
| size_t | m_nodeLimit {std::numeric_limits<size_t>::max()} |
| The maximum number of nodes. More... | |
| std::unordered_map< Robot *, MPTask * > | m_taskMap |
| The task for each robot. More... | |
| VertexIntervals | m_vertexIntervals |
| The current set of safe vertex intervals. More... | |
| EdgeIntervals | m_edgeIntervals |
| The current set of safe edge intervals. More... | |
| Protected Attributes inherited from MapEvaluatorMethod | |
| std::vector< size_t > | m_activeRobots |
| Protected Attributes inherited from MPBaseObject | |
| bool | m_debug |
| Print debug info? More... | |
Generates paths for each robot individually and then finds and resolves conflicts by setting constraints on each robot's path and replanning.
Reference: Guni Sharon, Roni Stern, Ariel Felner, and Nathan Sturtevant. "Conflict- Based Search For Optimal Multi-Agent Path Finding". AAAI 2012.
| typedef RoadmapType::EdgeID CBSQuery::EdgeID |
| typedef RoadmapType::VID CBSQuery::VID |
| CBSQuery::CBSQuery | ( | ) |
| CBSQuery::CBSQuery | ( | XMLNode & | _node | ) |
|
virtualdefault |
Compute the safe intervals for a robot given its constraint set in the node.
| _robot | The robot to compute safe intervals for. |
| _node | The node containing the constraint set. |
|
protected |
Construct the safe intervals that complement the unsafe intervals.
| _unsafeIntervals | The unsafe intervals that define the complement. |
|
protected |
Compute the cost of a CBS node. Can either be makespace or sum-of-cost.
| _node | Node to compute cost for. |
|
overridevirtual |
Initialize this object for the current MPProblem. This should reset any internal state of the algorithms so that they are ready for execution. It is also the place to initialize any state that depends on the current problem.
Reimplemented from MPBaseObject.
|
protected |
Merge a pair of intervals into a new interval.
| _interval1 | First interval to check. |
| _interval2 | Second interval to check. |
|
overridevirtual |
Evaluate a roadmap.
Implements MapEvaluatorMethod.
|
protected |
Check if two intervals are overlapping.
| _interval1 | First interval to check. |
| _interval2 | Second interval to check. |
Generate a path for a robot given a set of constraints.
| _robot | The robot to solve the task for. |
| _node | The CBS node to store the new path in. |
|
protected |
Create child nodes corresponding to the additional constraints.
| _node | The parent CBS node to spawn children for. |
| _constraints | The set of new constraints to spawn new child nodes for. |
| _lowLevel | The functor to plan new paths for robots with new constraints. |
| _cost | The functor to compute the cost of new child nodes. |
|
protected |
Validate that the set of paths in the node do not contain conflicts.
| _node | The node to validate |
|
protected |
The label of the cost function.
|
protected |
The current set of safe edge intervals.
|
protected |
The maximum number of nodes.
|
protected |
Query method for making individual plans.
|
protected |
The robots in the group.
|
protected |
Validity checker for conflict detection.
|
protected |
The current set of safe vertex intervals.