|
Parasol Planning Library (PPL)
|
|
Parasol Planning Library (PPL)
|
#include <MapEvaluatorMethod.h>
Public Member Functions | |
MapEvaluator Interface | |
| virtual bool | operator() ()=0 |
| virtual void | SetEdgeIntervals (EdgeIntervals _edgeIntervals) |
| Set the edge intervals of a roadmap. More... | |
| virtual void | SetMinEndtime (double _minEndtime) |
| Set the minimum end time of a path. More... | |
Active Robots | |
| |
| void | SetActiveRobots (const std::vector< size_t > &_activeRobots) |
| Set the active robots. More... | |
| std::vector< size_t > | GetActiveRobots () const |
| Get the active robots. More... | |
 Public Member Functions inherited from MPBaseObject Public Member Functions inherited from MPBaseObject | |
| MPBaseObject (const std::string &_label="", const std::string &_name="", bool _debug=false) | |
| MPBaseObject (XMLNode &_node) | |
| virtual | ~MPBaseObject () |
| virtual void | Print (std::ostream &_os) const |
| virtual void | Initialize () |
| const std::string & | GetName () const |
| Get the class name for this object. More... | |
| const std::string & | GetLabel () const |
| Get the unique label for this object. More... | |
| std::string | GetNameAndLabel () const |
| Get the unique string identifier for this object "m_name::m_label". More... | |
| void | SetLabel (const std::string &) |
| Set the unique label for this object. More... | |
| void | SetMPLibrary (MPLibrary *) noexcept |
| Set the owning MPLibrary. More... | |
| MPLibrary * | GetMPLibrary () const noexcept |
| Get the owning MPLibrary. More... | |
| bool | IsRunning () const noexcept |
| Check the library's running flag. More... | |
| MPProblem * | GetMPProblem () const noexcept |
| Get the library's current MPProblem. More... | |
| Environment * | GetEnvironment () const noexcept |
| Get the current environment. More... | |
| MPTask * | GetTask () const noexcept |
| Get the current task. More... | |
| GroupTask * | GetGroupTask () const noexcept |
| Get the current group task. More... | |
| MPSolutionType * | GetMPSolution () const noexcept |
| RoadmapType * | GetRoadmap (Robot *const _r=nullptr) const noexcept |
| Get the current free-space roadmap. More... | |
| GroupRoadmapType * | GetGroupRoadmap (RobotGroup *const _g=nullptr) const noexcept |
| Get the current free-space group roadmap. More... | |
| RoadmapType * | GetBlockRoadmap (Robot *const _r=nullptr) const noexcept |
| Get the current obstacle-space roadmap. More... | |
| Path * | GetPath (Robot *const _r=nullptr) const noexcept |
| GroupPath * | GetGroupPath (RobotGroup *const _g=nullptr) const noexcept |
| Get the current best group path. More... | |
| StatClass * | GetStatClass () const noexcept |
| Get the current StatClass. More... | |
| LocalObstacleMap * | GetLocalObstacleMap () const noexcept |
| Get the local obstacle map. More... | |
Protected Attributes | |
Internal State | |
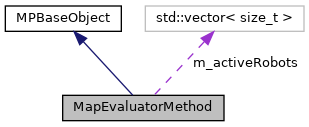
| std::vector< size_t > | m_activeRobots |
| Protected Attributes inherited from MPBaseObject | |
| bool | m_debug |
| Print debug info? More... | |
Construction | |
| typedef std::unordered_map< size_t, std::unordered_map< size_t, std::vector< Range< double > > > > | EdgeIntervals |
| MapEvaluatorMethod ()=default | |
| MapEvaluatorMethod (XMLNode &_node) | |
| virtual | ~MapEvaluatorMethod ()=default |
Additional Inherited Members | |
| Public Types inherited from MPBaseObject | |
| typedef DefaultWeight< Cfg > | WeightType |
| typedef GenericStateGraph< Cfg, WeightType > | RoadmapType |
| typedef GroupCfg< RoadmapType > | GroupCfgType |
| typedef GroupLocalPlan< RoadmapType > | GroupWeightType |
| typedef GroupRoadmap< GroupCfgType, GroupWeightType > | GroupRoadmapType |
| Protected Member Functions inherited from MPBaseObject | |
| void | SetName (const std::string &_s) |
| const std::string & | GetBaseFilename () const |
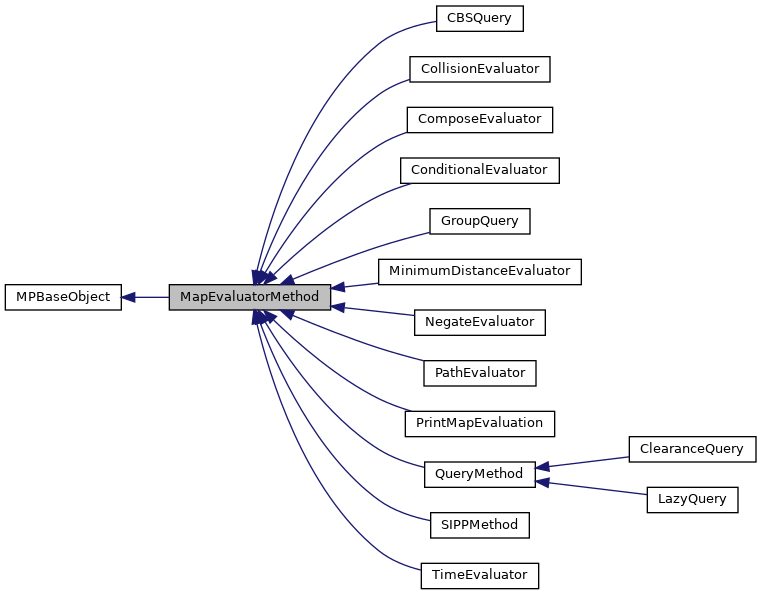
Base algorithm abstraction for MapEvaluators.
All MapEvaluators have one main function, operator(), which evaluates the current roadmap and returns true iff it satisfies a specific set of criteria.
| typedef std::unordered_map<size_t, std::unordered_map<size_t, std::vector<Range<double> > > > MapEvaluatorMethod::EdgeIntervals |
|
default |
| MapEvaluatorMethod::MapEvaluatorMethod | ( | XMLNode & | _node | ) |
|
virtualdefault |
| std::vector< size_t > MapEvaluatorMethod::GetActiveRobots | ( | ) | const |
Get the active robots.
|
pure virtual |
Evaluate a roadmap.
Implemented in TimeEvaluator, SIPPMethod, QueryMethod, PathEvaluator, NegateEvaluator, MinimumDistanceEvaluator, GroupQuery, ComposeEvaluator, CBSQuery, PrintMapEvaluation, ConditionalEvaluator, and CollisionEvaluator.
| void MapEvaluatorMethod::SetActiveRobots | ( | const std::vector< size_t > & | _activeRobots | ) |
Set the active robots.
|
inlinevirtual |
Set the edge intervals of a roadmap.
|
inlinevirtual |
Set the minimum end time of a path.
|
protected |
The active robots, used only by group map evaluators. Depending on the evaluator, the usage could be different, but the current use case is to set the robot(s) that are being moved, then a clearance check is done only considering those specified bodies (see MinimumClearanceEvaluator).