|
Parasol Planning Library (PPL)
|
|
Parasol Planning Library (PPL)
|
#include <GroupStrategyMethod.h>
Public Types | |
Motion Planning Types | |
| typedef MPBaseObject::GroupCfgType | GroupCfgType |
| typedef MPBaseObject::GroupRoadmapType | GroupRoadmapType |
| typedef GroupRoadmapType::VID | VID |
| typedef SamplerMethod::BoundaryMap | BoundaryMap |
 Public Types inherited from MPStrategyMethod Public Types inherited from MPStrategyMethod | |
| typedef size_t | VID |
| Public Types inherited from MPBaseObject | |
| typedef DefaultWeight< Cfg > | WeightType |
| typedef GenericStateGraph< Cfg, WeightType > | RoadmapType |
| typedef GroupCfg< RoadmapType > | GroupCfgType |
| typedef GroupLocalPlan< RoadmapType > | GroupWeightType |
| typedef GroupRoadmap< GroupCfgType, GroupWeightType > | GroupRoadmapType |
Public Member Functions | |
Construction | |
| GroupStrategyMethod ()=default | |
| GroupStrategyMethod (XMLNode &_node) | |
| virtual | ~GroupStrategyMethod ()=default |
| Public Member Functions inherited from MPStrategyMethod | |
| MPStrategyMethod ()=default | |
| MPStrategyMethod (XMLNode &_node) | |
| virtual | ~MPStrategyMethod () |
| virtual void | Print (std::ostream &_os) const override |
| void | operator() () |
| Execute the strategy by calling Initialize, Run, and Finalize. More... | |
| void | EnableOutputFiles (const bool _enable=true) |
| virtual void | Initialize () |
| Public Member Functions inherited from MPBaseObject | |
| MPBaseObject (const std::string &_label="", const std::string &_name="", bool _debug=false) | |
| MPBaseObject (XMLNode &_node) | |
| virtual | ~MPBaseObject () |
| const std::string & | GetName () const |
| Get the class name for this object. More... | |
| const std::string & | GetLabel () const |
| Get the unique label for this object. More... | |
| std::string | GetNameAndLabel () const |
| Get the unique string identifier for this object "m_name::m_label". More... | |
| void | SetLabel (const std::string &) |
| Set the unique label for this object. More... | |
| void | SetMPLibrary (MPLibrary *) noexcept |
| Set the owning MPLibrary. More... | |
| MPLibrary * | GetMPLibrary () const noexcept |
| Get the owning MPLibrary. More... | |
| bool | IsRunning () const noexcept |
| Check the library's running flag. More... | |
| MPProblem * | GetMPProblem () const noexcept |
| Get the library's current MPProblem. More... | |
| Environment * | GetEnvironment () const noexcept |
| Get the current environment. More... | |
| MPTask * | GetTask () const noexcept |
| Get the current task. More... | |
| GroupTask * | GetGroupTask () const noexcept |
| Get the current group task. More... | |
| MPSolutionType * | GetMPSolution () const noexcept |
| RoadmapType * | GetRoadmap (Robot *const _r=nullptr) const noexcept |
| Get the current free-space roadmap. More... | |
| GroupRoadmapType * | GetGroupRoadmap (RobotGroup *const _g=nullptr) const noexcept |
| Get the current free-space group roadmap. More... | |
| RoadmapType * | GetBlockRoadmap (Robot *const _r=nullptr) const noexcept |
| Get the current obstacle-space roadmap. More... | |
| Path * | GetPath (Robot *const _r=nullptr) const noexcept |
| GroupPath * | GetGroupPath (RobotGroup *const _g=nullptr) const noexcept |
| Get the current best group path. More... | |
| StatClass * | GetStatClass () const noexcept |
| Get the current StatClass. More... | |
| LocalObstacleMap * | GetLocalObstacleMap () const noexcept |
| Get the local obstacle map. More... | |
Protected Member Functions | |
MPStrategyMethod Overrides | |
| virtual void | Finalize () override |
| Clean-up and output results. More... | |
| virtual size_t | GenerateStart (const std::string &_samplerLabel) override |
| virtual std::vector< size_t > | GenerateGoals (const std::string &_samplerLabel) override |
Helpers | |
| BoundaryMap | GetStartBoundaryMap () const noexcept |
| std::vector< BoundaryMap > | GetGoalBoundaryMaps () const noexcept |
| Protected Member Functions inherited from MPStrategyMethod | |
| virtual void | Run () |
| Call Iterate until EvaluateMap is true. More... | |
| virtual bool | EvaluateMap () |
| Check if we satisfied all map evaluators. More... | |
| virtual void | Iterate () |
| Execute one iteration of the strategy. More... | |
| virtual void | ClearRoadmap () |
| Pre-clear the roadmap(s) if requested. More... | |
| Protected Member Functions inherited from MPBaseObject | |
| void | SetName (const std::string &_s) |
| const std::string & | GetBaseFilename () const |
Additional Inherited Members | |
| Protected Attributes inherited from MPStrategyMethod | |
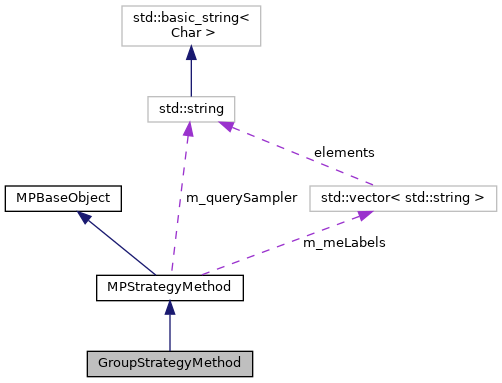
| std::string | m_querySampler |
| Sampler for generating start/goal. More... | |
| std::vector< std::string > | m_meLabels |
| The list of map evaluators to use. More... | |
| size_t | m_iterations {0} |
| The number of executed iterations. More... | |
| bool | m_writeOutput {true} |
| Write output at the end? More... | |
| bool | m_clearMap {false} |
| Clear the roadmap(s) before run? More... | |
| Protected Attributes inherited from MPBaseObject | |
| bool | m_debug |
| Print debug info? More... | |
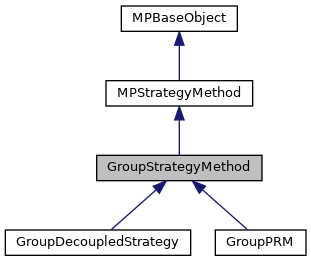
Base algorithm abstraction for MPStrategies that plan for robot groups.
|
default |
| GroupStrategyMethod::GroupStrategyMethod | ( | XMLNode & | _node | ) |
|
virtualdefault |
|
overrideprotectedvirtual |
Clean-up and output results.
Reimplemented from MPStrategyMethod.
Reimplemented in GroupDecoupledStrategy.
|
overrideprotectedvirtual |
Generate 'goal' node(s) for the task and add it(them) to the roadmap.
| _samplerLabel | The label for the sampler to use if no query sampler was provided, or empty to require a query sampler. |
Reimplemented from MPStrategyMethod.
|
overrideprotectedvirtual |
Generate a 'start' node for the task and add it to the roadmap.
| _samplerLabel | The label for the sampler to use if no query sampler was provided, or empty to require a query sampler. |
Reimplemented from MPStrategyMethod.
|
protectednoexcept |
Get a map from robot -> boundary for each of the current group task's goal constraints.
|
protectednoexcept |
Get a map from robot -> boundary for the current group task's start constraints.